You can also find most up-to-date entries for my latest publications on the Google Scholar page.
2025

Vincent Mallet, Chiara Rapisarda, Hervé Minoux, Maks Ovsjanikov
We propose the first fully automatic and efficient method dedicated to finding antibodies in cryo-EM maps: CrAI. This machine learning approach leverages the conserved structure of antibodies and a dedicated novel database that we built to solve this problem. Running...
Bioinformatics Journal, 2025
[paper] [supplementary] [code demo]

Giulio Viganò, Maks Ovsjanikov, Simone Melzi
In this paper we introduce the concept of Neural Adjoint Maps, a novel neural representation that generalizes the traditional solution of functional maps for estimating correspondence between manifolds. Fostering our neural representation, we propose an iterative algorithm explicitly designed to...
Transactions on Graphics (Proc. SIGGRAPH, journal track), 2025
[paper] [supplementary] [code demo]

Souhail Hadgi, Luca Moschella, Andrea Santilli, Diego Gomez, Qixing Huang, Emanuele Rodolà, Simone Melzi, Maks Ovsjanikov
In this work, we investigate the possibility of a posteriori alignment of representations obtained from uni-modal 3D encoders compared to text-based feature spaces. We show that naive post-training feature alignment of uni-modal text and 3D encoders results in limited performance....
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2025
[paper] [supplementary]

Vincent Mallet, Souhaib Attaiki, Yangyang Miao, Bruno Correia, Maks Ovsjanikov
In this work, we first adapt a state-of-the-art surface encoder for protein learning tasks. We then perform a direct and fair comparison of the resulting method against alternative approaches within the Atom3D benchmark, highlighting the limitations of pure surface-based learning....
Proc. International Conference on Learning Representations (ICLR), 2025
[paper] [compressed [5MB]] [code demo]

Diego Gomez, Bingchen Gong, Maks Ovsjanikov
We present a novel approach for few-shot NeRF estimation, aimed at avoiding local artifacts and capable of efficiently reconstructing real scenes. In contrast to previous methods that rely on pre-trained modules or various data-driven priors that only work well in...
Proc. International Conference on 3D Vision (3DV), 2025
[paper] [compressed [5MB]] [code demo] [project website]

Souhaib Attaiki, Paul Guerrero, Duygu Ceylan, Niloy Mitra, Maks Ovsjanikov
We train a feed-forward text-to-3D diffusion generator for human characters using only single-view 2D data for supervision. Existing 3D generative models cannot yet match the fidelity of image and/or video generative models. Stateof-the-art 3D generators are either trained with explicit...
Winter Conference on Applications of Computer Vision (WACV), 2025
[paper] [project website]
2024

Maysam Behmanesh, Maks Ovsjanikov
In this paper, we present Smoothed Graph Contrastive Learning (SGCL), which improves the standard graph contrastive learning by leveraging the geometric structure of augmented graphs. We show how to inject proximity information associated with positive/negative pairs in the contrastive loss,...
Learning on Graphs (LOG), 2024
[paper] [code demo]

Léopold Maillard, Nicolas Sereyjol-Garros, Tom Durand, Maks Ovsjanikov
We introduce DeBaRA, a score-based model specifically tailored for precise, controllable and flexible arrangement generation in a bounded environment. We argue that the most critical component of a scene synthesis system is to accurately establish the size and position of...
Proc. Conference on Neural Information Processing Systems (NeurIPS), 2024
[paper]

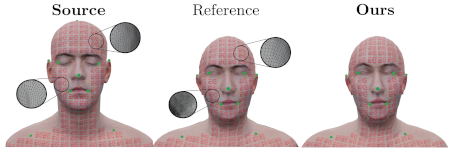
Ramana Sundararaman, Nicolas Donati, Simone Melzi, Etienne Corman, Maks Ovsjanikov
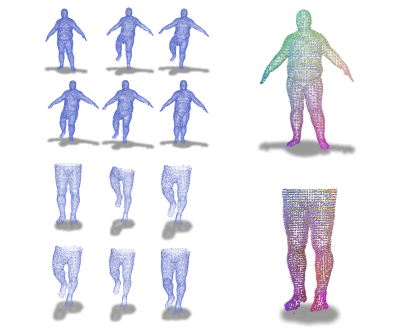
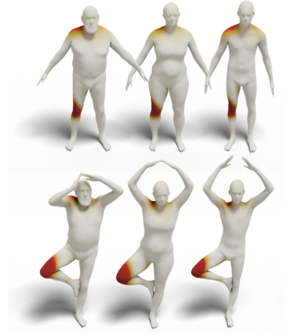
We introduce a novel data-driven approach aimed at designing high-quality shape deformations based on a coarse localized input signal. Unlike previous data-driven methods that require a global shape encoding, we show that detail-preserving deformations can be estimated reliably without any...
Transactions on Graphics (Proc. SIGGRAPH Asia, journal track), 2024
[paper] [compressed [4MB]] [code demo]
Souhail Hadgi, Lei Li, Maks Ovsjanikov
We conduct the first in-depth quantitative and qualitative investigation of supervised and contrastive pre-training strategies and their utility in downstream 3D tasks. We demonstrate that layer-wise analysis of learned features provides significant insight into the downstream utility of trained networks....
Proc. European Conference on Computer Vision (ECCV), 2024
[paper] [supplementary]

Jarne Van den Herrewegen, Tom Tourwé, Maks Ovsjanikov, Francis wyffels
In this paper, we show, for the first time, how 3D foundation models can be leveraged for 3D-to-3D retrieval performance on seven different datasets. We evaluate both the pre-trained foundation models, as well as their fine-tuned versions using downstream data....
Proc. Symposium on 3D Object Retrieval (3DOR), 2024
[paper] [supplementary] [code]

Ramana Sundararaman, Roman Klokov, Maks Ovsjanikov
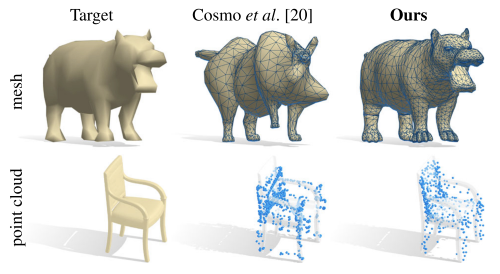
We propose a self-supervised training scheme to the Neural Dual Contouring meshing framework, which we denote Self-Supervised Dual Contouring (SDC). Instead of optimizing predicted mesh vertices with supervised training, we use two novel self-supervised loss functions that encourage the consistency...
Highlight (2.8% acceptance rate)
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024
[paper] [supplementary] [code]

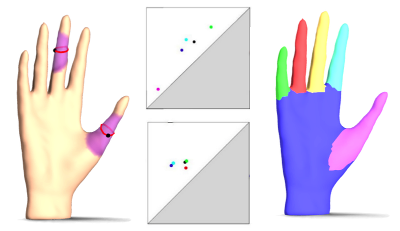
Thomas Wimmer, Peter Wonka, Maks Ovsjanikov
In this work, we propose to explore foundation models for the task of keypoint detection on 3D shapes. To address this problem, we propose, first, to back-project features from large pre-trained 2D vision models onto 3D shapes and employ them...
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024
[paper] [supplementary] [website] [code]

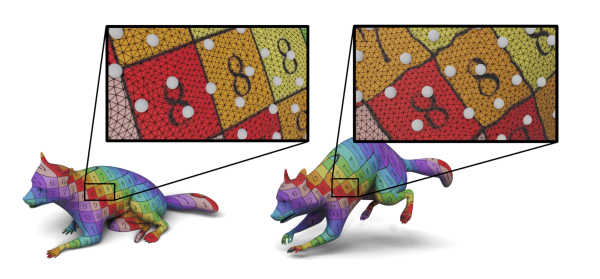
Robin Magnet, Maks Ovsjanikov
We introduce a novel memory-scalable and efficient functional map learning pipeline. By leveraging the specific structure of functional maps, we offer the possibility to achieve identical results without ever storing the pointwise map in memory. Furthermore, based on the same...
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024
[paper] [supplementary] [code (learning pipeline)] [code (differentiable ZoomOut)]

Nissim Maruani, Maks Ovsjanikov Pierre Alliez and Mathieu Desbrun
In this work, we introduce a novel learnable mesh representation through a set of local 3D sample Points, Normals and Quadric error metrics (QEMs) w.r.t. the underlying shape, which we denote PoNQ. A global mesh is directly derived from PoNQ...
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024
[paper] [supplementary] [website] [code]
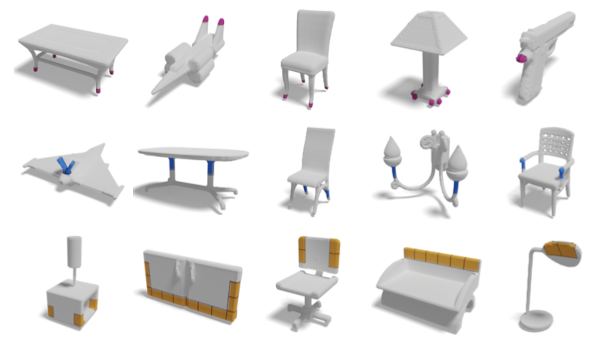
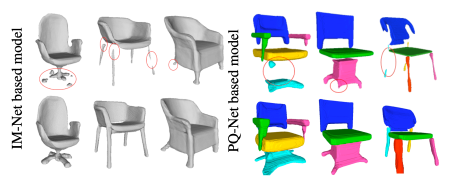
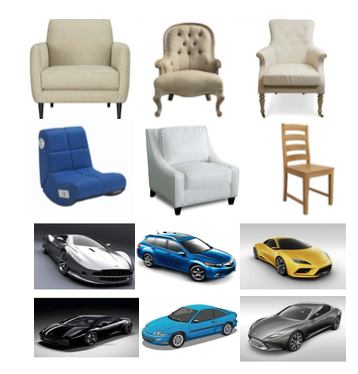
Mariem Mezghanni, Malika Boulkenafed, Maks Ovsjanikov
In this work, we propose a novel generative model that improves the generation quality by compactly embedding local geometries in a rotation- and translation-invariant manner. This strategy allows our codebook of discrete codes to express a larger range of geometric...
Proc. International Conference on 3D Vision (3DV), 2024
[paper] [supplementary]
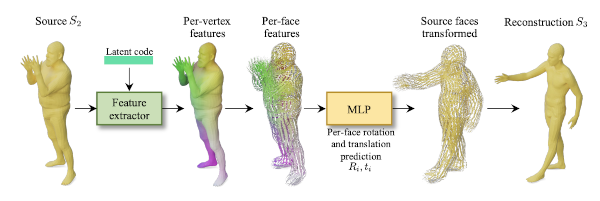
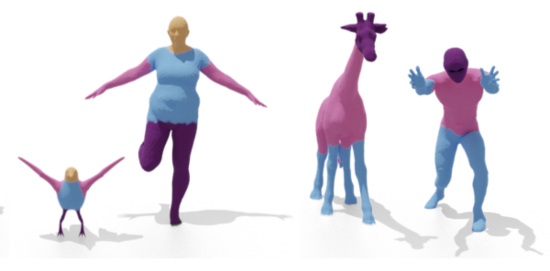
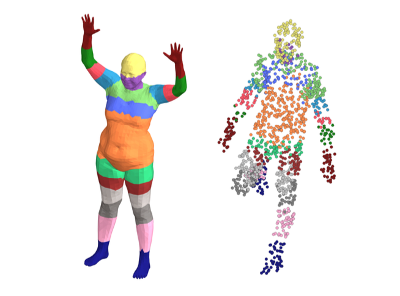
Sara Hahner*, Souhaib Attaiki*, Jochen Garcke, Maks Ovsjanikov
We introduce a novel learning-based method for encoding and manipulating 3D surface meshes. Our method is specifically designed to create an interpretable embedding space for deformable shape collections. Unlike previous 3D mesh autoencoders that require meshes to be in a...
*equal contribution
Proc. International Conference on 3D Vision (3DV), 2024
[paper] [supplementary] [code]
2023
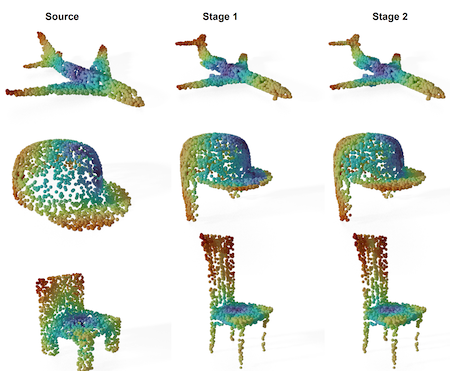
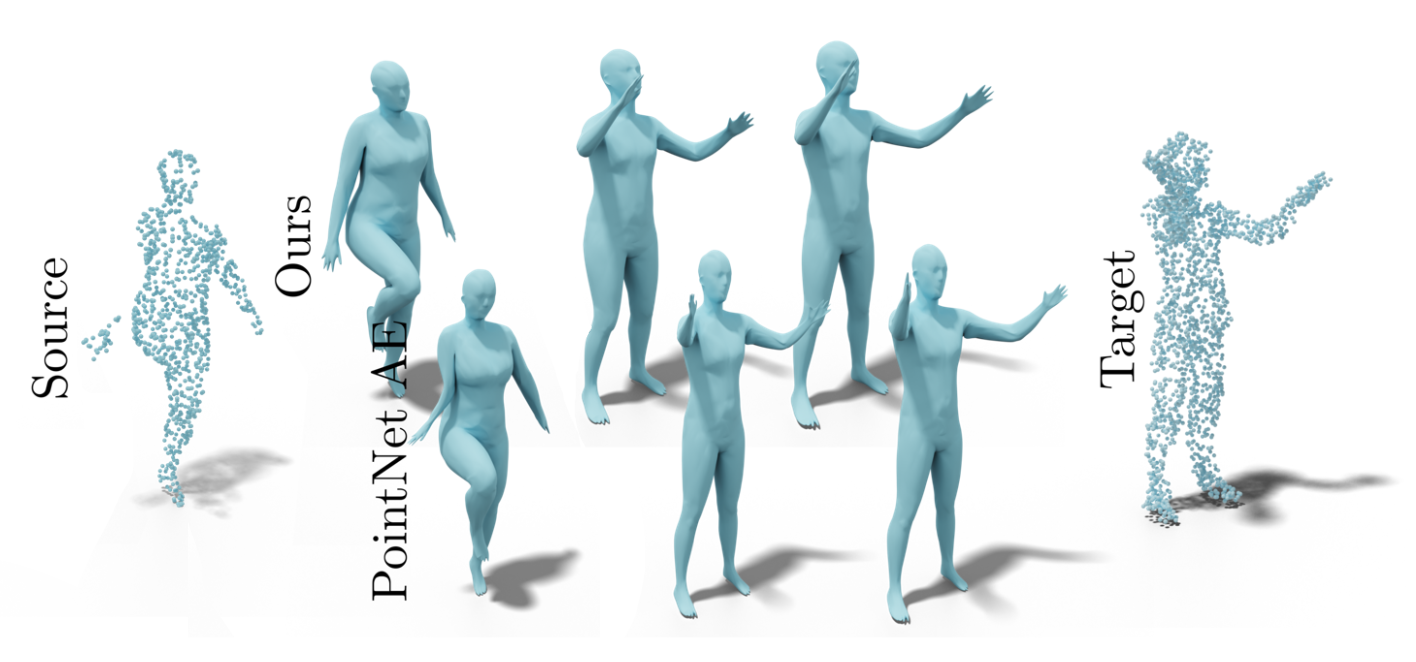
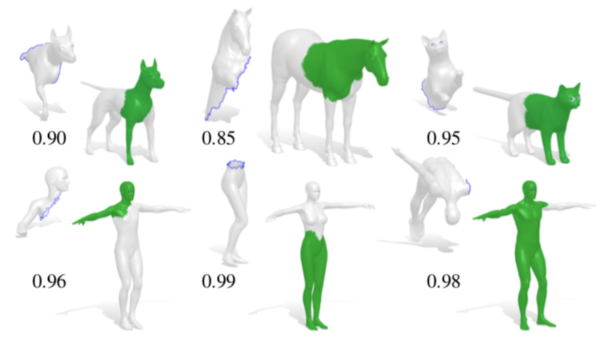
Souhaib Attaiki, Maks Ovsjanikov
We present Shape Non-rigid Kinematics (SNK), a novel zero-shot method for non-rigid shape matching. SNK operates on a single pair of shapes, and employs a reconstruction-based strategy using an encoder-decoder architecture, which deforms the source shape to closely match the...
Proc. Conference on Neural Information Processing Systems (NeurIPS), 2023
[paper] [code]
Ahmed Abdelreheem, Abdelrahman Eldesokey, Maks Ovsjanikov, Peter Wonka
We propose a novel zero-shot approach to computing correspondences between 3D shapes. For this, we introduce a fully automatic method that exploits the exceptional reasoning capabilities of recent foundation models in language and vision (BLIP2, ChatGPT).
Proc. SIGGRAPH Asia Conference, 2023
[paper] [supplementary] [project website]
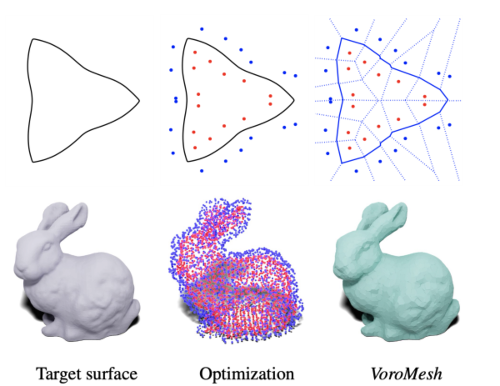
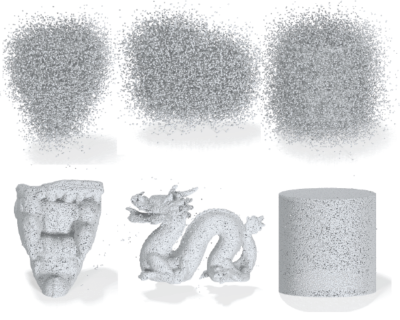
Nissim Maruani, Roman Klokov, Maks Ovsjanikov, Pierre Alliez, Mathieu Desbrun
In this work, we present VoroMesh, a novel and differentiable Voronoi-based representation of watertight 3D shape surfaces. From a set of 3D points (called generators) and their associated occupancy, we define our boundary representation through the Voronoi diagram of the...
Proc. International Conference on Computer Vision (ICCV), 2023
[paper] [supplementary] [project website] [code] [data]
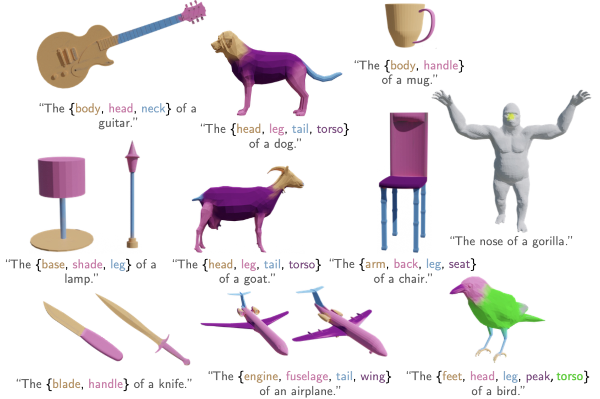
Ahmed Abdelreheem, Ivan Skorokhodov, Maks Ovsjanikov, Peter Wonka
We explore the task of zero-shot semantic segmentation of 3D shapes by using large-scale off-the-shelf 2D image recognition models. Surprisingly, we find that modern zero-shot 2D object detectors are better suited for this task than contemporary text/image similarity predictors or...
Proc. International Conference on Computer Vision (ICCV), 2023
[paper] [supplementary] [project website] [code and data]
Mingze Sun, Shiwei Mao, Puhua Jiang, Maks Ovsjanikov, Ruqi Huang
In this paper, we investigate the utility of cycle consistency in Deep Functional Maps. We first justify that under certain conditions, the learned maps, when represented in the spectral domain, are already cycle consistent. Furthermore, we identify the discrepancy that...
Proc. International Conference on Computer Vision (ICCV), 2023
[paper] [supplementary] [code demo]
Maysam Behmanesh, Maximilian Krahn, Maks Ovsjanikov
In this paper, we present a novel method based on time derivative graph diffusion (TIDE) to overcome the structural limitations of the message-passing framework in graph neural networks. Our approach allows for optimizing the spatial extent of diffusion across various...
Proc. International Conference on Machine Learning (ICML), 2023
[paper] [code demo]
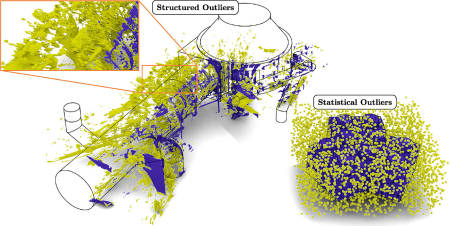
Maxime Kirgo, Guillaume Terrasse, Guillaume Thibault, Maks Ovsjanikov
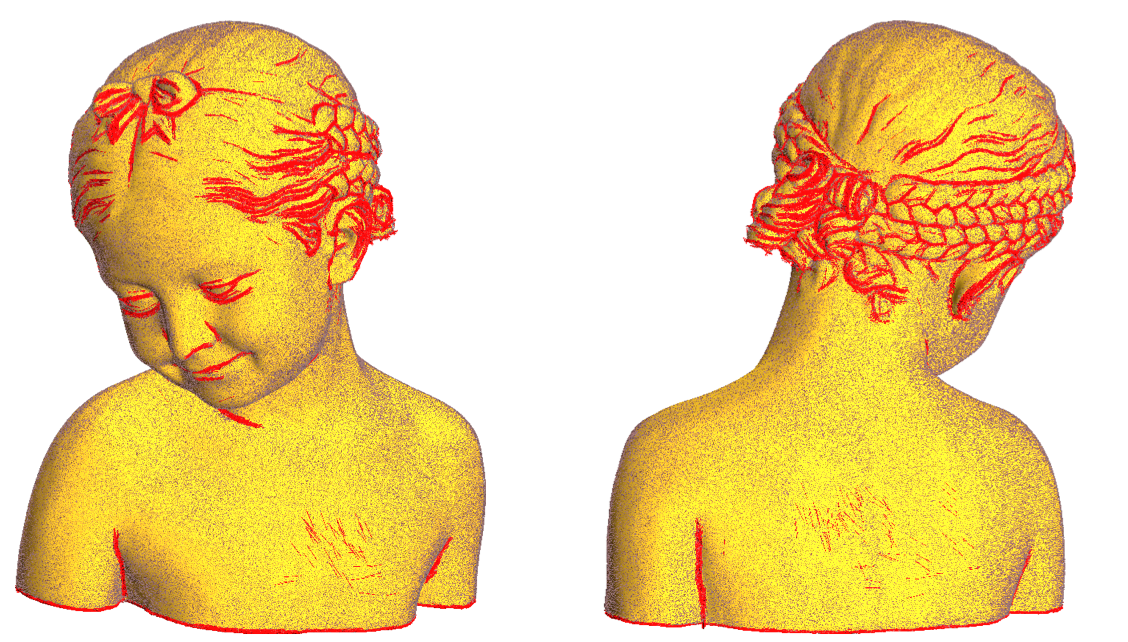
Laser acquisition of large-scale point clouds is prone to several categories of measurement errors, which can lead, in particular, to the presence of undesirable outlier points. Existing outlier detection techniques are primarily based on analyzing local properties of point distributions...
ISPRS Journal of Photogrammetry and Remote Sensing, 2023
[paper] [code demo]
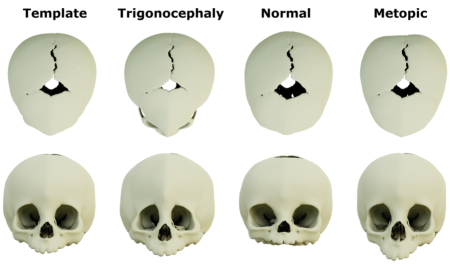
Robin Magnet, Kevin Bloch, Maxime Taverne, Simone Melzi, Maya Geoffroy, Roman H. Khonsari, Maks Ovsjanikov
We present a novel method for the morphometric analysis of series of 3D shapes, and demonstrate its relevance for the detection and quantification of two craniofacial anomalies: trigonocephaly and metopic ridges, using CT‐scans of young children. Our approach is fully...
Journal of Morphology, 2023
[paper] [code demo]
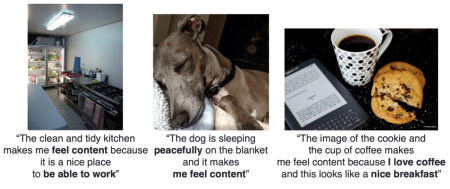
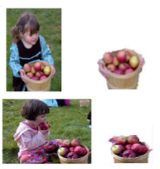
Panos Achlioptas, Maks Ovsjanikov, Leonidas Guibas, Sergey Tulyakov
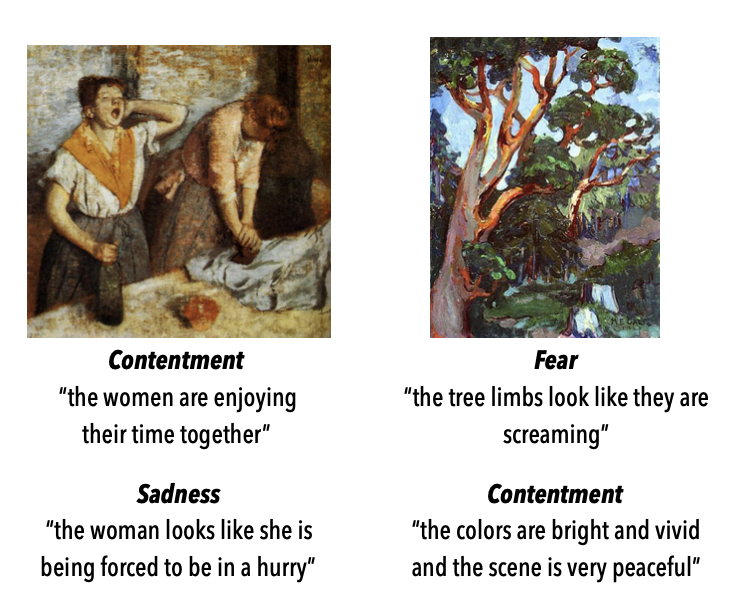
Real-world images often convey emotional intent, i.e., the photographer tries to capture and promote an emotionally interesting story. In this work, we explore the emotional reactions that real-world images tend to induce by using natural language as the medium to...
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023
[paper] [supplementary] [website]
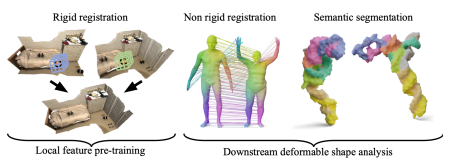
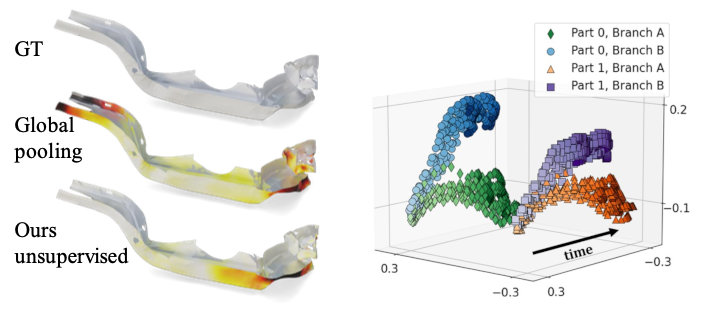
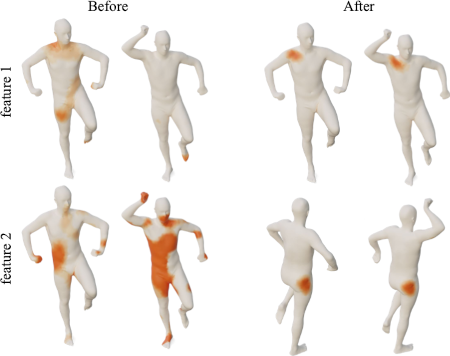
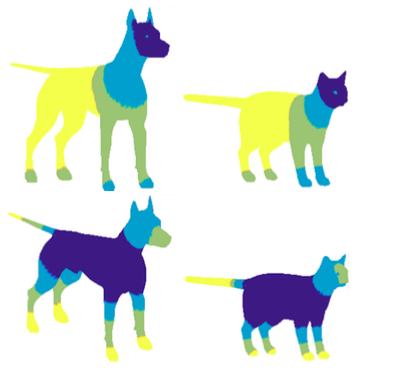
Souhaib Attaiki, Lei Li, Maks Ovsjanikov
In this paper, we analyze the link between feature locality and transferability in tasks involving deformable 3D objects, while also comparing different backbones and losses for local feature pre-training. We observe that with proper training, learned features can be useful...
Highlight (2.5% acceptance rate)
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023
[paper] [compressed [3MB]] [supplementary] [code demo]
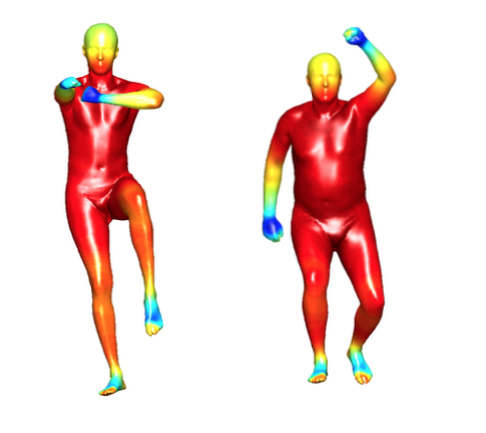
Souhaib Attaiki, Maks Ovsjanikov
We show that under some mild conditions, the features learned within deep functional map approaches can be used as point-wise descriptors and thus are directly comparable across different shapes, even without the necessity of solving for a functional map at...
Highlight (2.5% acceptance rate)
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023
[paper] [supplementary] [code demo]
Robin Magnet, Maks Ovsjanikov
We propose a new scalable version of the functional map pipeline that allows to efficiently compute correspondences between potentially very dense meshes. In particular, our method overcomes the computational burden of both computing the basis, as well the functional and...
Proc. Eurographics, 2023
[paper [52MB]] [compressed [2MB]] [code demo]
2022
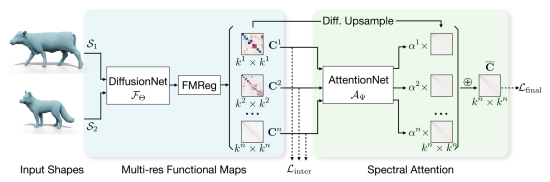
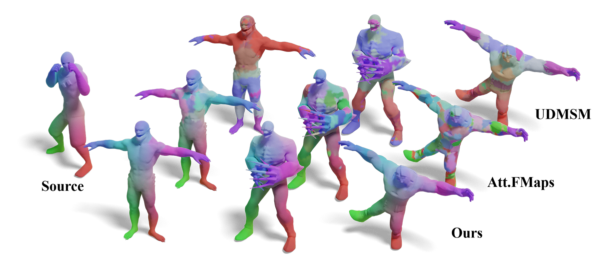
Lei Li, Nicolas Donati, Maks Ovsjanikov
We present a novel non-rigid shape matching framework based on multi-resolution functional maps with spectral attention. Our framework is applicable in both supervised and unsupervised settings, and we show that it is possible to train the network so that it...
Spotlight presentation
Proc. Conference on Neural Information Processing Systems (NeurIPS), 2022
[paper] [code demo]
Souhaib Attaiki, Maks Ovsjanikov
We present Neural Correspondence Prior (NCP), a new paradigm for computing correspondences between 3D shapes. Our key observation is that given a noisy map as input, training a feature extraction network with the input map as supervision tends to remove...
Proc. Conference on Neural Information Processing Systems (NeurIPS), 2022
[paper] [compressed [4MB]] [code demo]
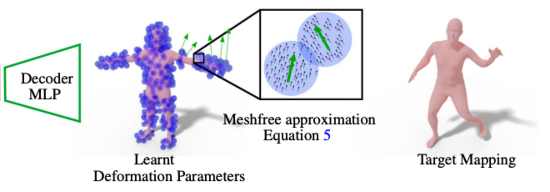
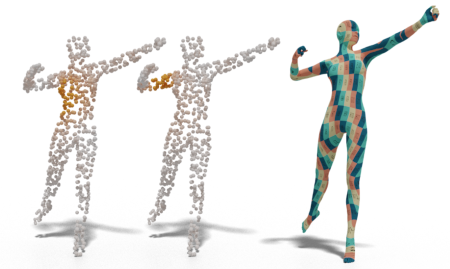
Ramana Sundararaman, Riccardo Marin, Emanuele Rodolà, Maks Ovsjanikov
In this work, we present a novel approach for computing correspondences between non-rigid objects, by exploiting a reduced representation of deformation fields via an approximation based on mesh-free methods. By letting the network learn deformation parameters at a sparse set...
Proc. Conference on Neural Information Processing Systems (NeurIPS), 2022
[paper] [supplementary] [poster] [code demo]
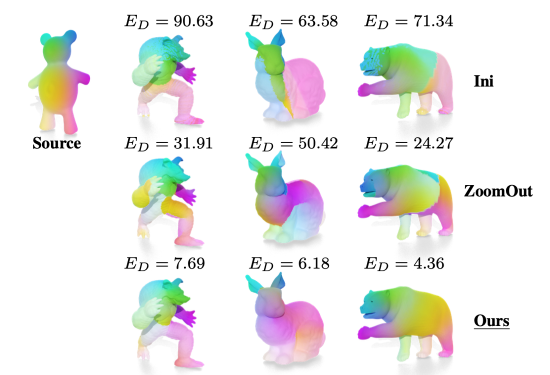
Robin Magnet, Jing Ren, Olga Sorkine-Hornung, Maks Ovsjanikov
We introduce pointwise map smoothness via the Dirichlet energy into the functional map pipeline, and propose an algorithm for optimizing it efficiently. Moreover, we demonstrate that several previously proposed methods for computing smooth maps can be reformulated as variants of...
oral presentation, Best Paper Award
{kind=link}
Proc. International Conference on 3D Vision (3DV), 2022
[paper] [compressed [2MB]] [supplementary] [poster] [video] [code demo]
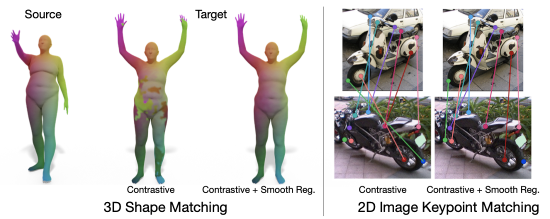
Lei Li, Souhaib Attaiki, Maks Ovsjanikov
In this work, we present a novel learning-based framework that combines the local accuracy of contrastive learning with the global consistency of geometric approaches for robust non-rigid matching. We first observe that while contrastive learning can lead to powerful point-wise...
Proc. International Conference on 3D Vision (3DV), 2022
[paper] [compressed [2MB]] [supplementary] [poster] [video] [code demo]
Ramana Sundararaman, Gautam Pai, Maks Ovsjanikov
In this paper, we introduce an approach for non-rigid shape correspondence based on an auto-decoder framework. Our method learns a continuous volumetric shape-wise deformation field over a fixed template. By supervising the deformation field for points on-surface and regularizing for...
oral presentation (2.7% acceptance rate)
Proc. European Conference on Computer Vision (ECCV), 2022
[paper] [supplementary] [code demo]
Mikhail Panine, Maxime Kirgo, Maks Ovsjanikov
We propose a principled approach for non-isometric landmark-preserving non-rigid shape matching. Our method is based on the functional maps framework, but focuses on near-conformal maps that preserve landmarks exactly. We achieve this, first, by introducing a novel landmark-adapted basis using...
Computer Graphics Forum, 2022
[paper] [compressed [4MB]] [code demo]
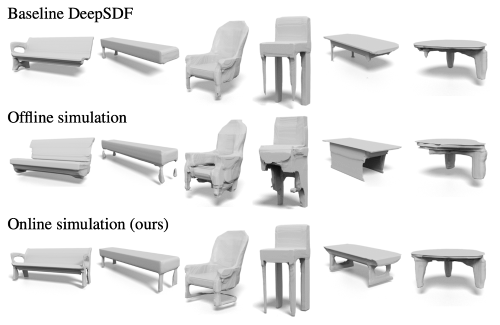
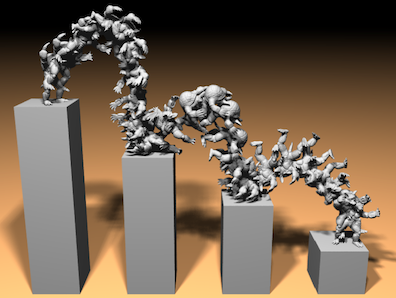
Mariem Mezghanni, Théo Bodrito, Malika Boulkenafed, Maks Ovsjanikov
We introduce a novel approach for generative 3D modeling that explicitly encourages the physical and thus functional consistency of the generated shapes. To this end, we advocate the use of online physical simulation as part of learning a generative model....
oral presentation (~4% acceptance rate).
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022
[paper] [supplementary materials] [video]

Nicolas Donati, Etienne Corman, Maks Ovsjanikov
We propose a new deep learning approach to learn orientation-aware features in a fully unsupervised setting. Our architecture is built on DiffusionNet, which makes our method robust to discretization changes, while adding a vector-field-based loss, which promotes orientation preservation without...
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022
[paper] [compressed [2MB]] [video] [code]
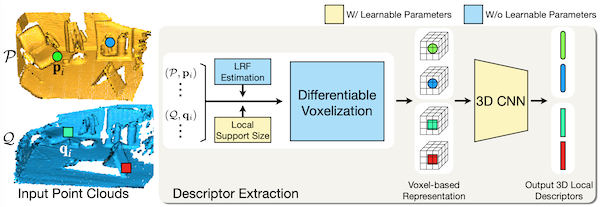
Lei Li, Hongbo Fu, Maks Ovsjanikov
We present a method called WSDesc to learn 3D local descriptors in a weakly supervised manner for robust point cloud registration. Our work builds upon recent 3D CNN-based descriptor extractors, which leverage a voxel-based representation to parameterize the local geometry...
IEEE Transactions on Visualization and Computer Graphics (TVCG), 2022
[paper] [compressed [3MB]] [code]
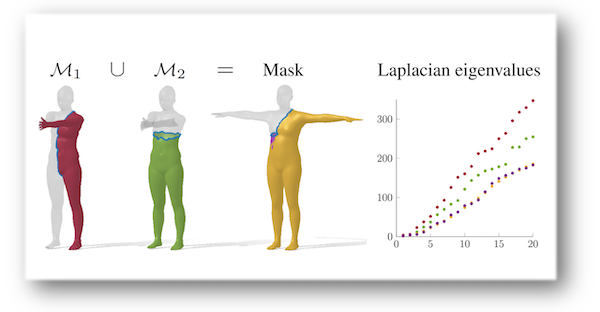
Luca Moschella, Simone Melzi, Luca Cosmo, Filippo Maggioli, Or Litany, Maks Ovsjanikov, Leonidas Guibas, Emanuele Rodolà
We introduce a learning-based method to estimate the Laplacian spectrum of the union of partial non-rigid 3D shapes, without actually computing the 3D geometry of the union or any correspondence between those partial shapes. We do so by operating purely...
Proc. Eurographics, 2022
[paper] [supplementary materials] [code]

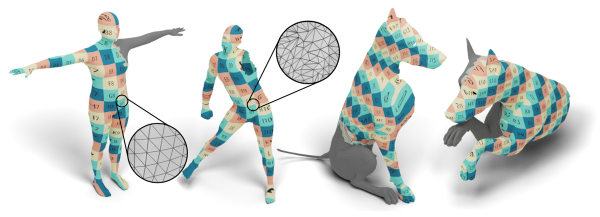
Nicholas Sharp, Souhaib Attaiki, Keenan Crane, Maks Ovsjanikov
We introduce a new approach to deep learning on 3D surfaces, based on the insight that a simple diffusion layer is highly effective for spatial communication. The resulting networks automatically generalize across different samplings and resolutions of a surface—a basic...
Transactions on Graphics, 2022
[paper] [compressed [3MB]] [code]

Nicolas Donati, Etienne Corman, Simone Melzi, Maks Ovsjanikov
In this paper, we introduce complex functional maps, which extend the functional map framework to conformal maps between tangent vector fields on surfaces. A key property of these maps is their orientation awareness. More specifically, we demonstrate that unlike regular...
Computer Graphics Forum, 2022
[paper] [compressed [2MB]] [code] [video]
2021
Souhaib Attaiki, Gautam Pai, Maks Ovsjanikov
In this paper, we propose the first learning method aimed directly at partial non-rigid shape correspondence. Our approach uses the functional map framework, can be trained in a supervised or unsupervised manner, and learns descriptors directly from the data, thus...
oral presentation. Best Paper Award
Proc. International Conference on 3D Vision (3DV), 2021
[paper] [supplementary] [code demo] [video]
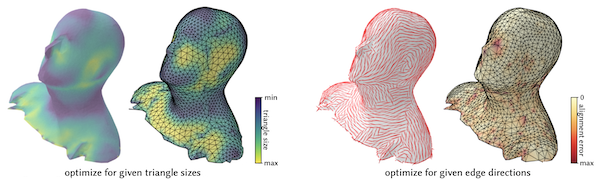
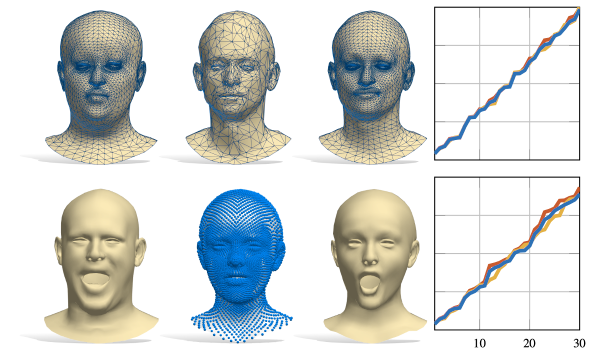
Marie-Julie Rakotosaona, Noam Aigerman, Niloy Mitra, Maks Ovsjanikov, Paul Guerrero
In this work, we present a differentiable surface triangulation that enables optimization for any per-vertex or per-face differentiable objective function over the space of underlying surface triangulations. Our method builds on the result that any 2D triangulation can be achieved...
Transactions on Graphics (Proc. SIGGRAPH Asia), 2021
[paper] [code]
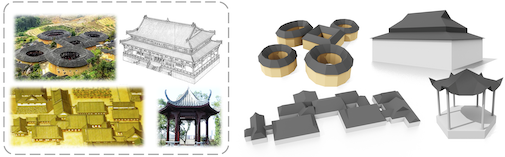
Jing Ren, Biao Zhang, Bojian Wu, Jianqiang Huang, Lubin Fan, Maks Ovsjanikov, Peter Wonka
We propose a novel and flexible roof modeling approach that can be used for constructing planar 3D polygon roof meshes. Our method uses a graph structure to encode roof topology and enforces the roof validity by optimizing a simple but...
Transactions on Graphics (Proc. SIGGRAPH Asia), 2021
[paper] [code] [video]
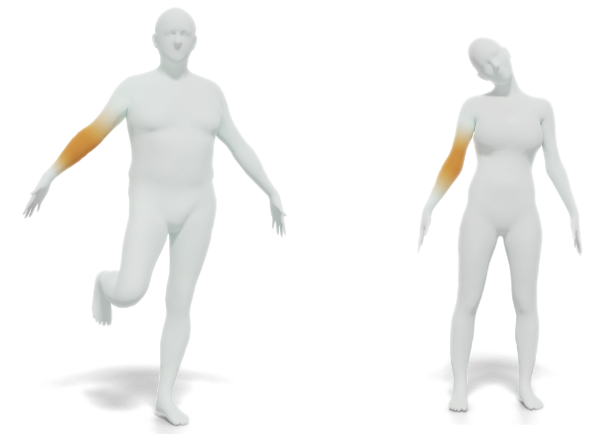
Robin Magnet, Maks Ovsjanikov
We propose a novel pointwise descriptor, called DWKS, aimed at finding correspondences across two deformable shape collections. By leveraging the collection information our descriptor facilitates difficult non-rigid shape matching tasks, even in the presence of strong partiality and significant deformations....
International Conference on Computer Vision (ICCV), 2021
[paper] [supplementary] [code demo]
Riccardo Marin, Arianna Rampini, Umberto Castellani, Rodolà, Maks Ovsjanikov, Simone Melzi
We introduce a novel learning-based method to recover shapes from their Laplacian spectra, based on establishing and exploring connections in a learned latent space. These latent space connections enable novel applications for both analyzing and controlling the spectral properties of...
International Journal of Computer Vision (IJCV), 2021
[paper] [code demo]
Jing Ren, Simone Melzi, Peter Wonka, Maks Ovsjanikov
We propose a novel discrete solver for optimizing functional map-based energies, including descriptor preservation, bijectivity and Laplacian commutativity among others. Our approach enforces the functional map to be associated with a pointwise correspondence as a hard constraint, while providing a...
Proc. Symposium on Geometry Processing, 2021
[paper] [supplementary] [code] [video]
Panos Achlioptas, Maks Ovsjanikov, Kilichbek Haydarov, Mohamed Elhoseiny, Leonidas Guibas
We present a novel large-scale dataset and accompanying machine learning models aimed at providing a detailed understanding of the interplay between visual content, its emotional effect, and explanations for the latter in language. In contrast to most existing annotation datasets...
oral presentation
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021
[paper] [supplementary] [website] [code] [videos]
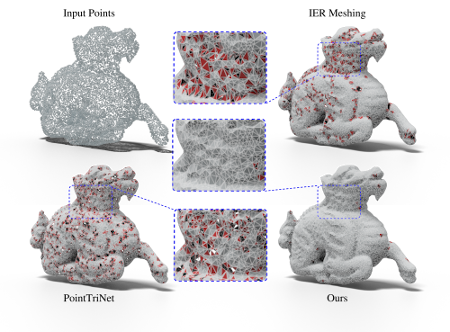
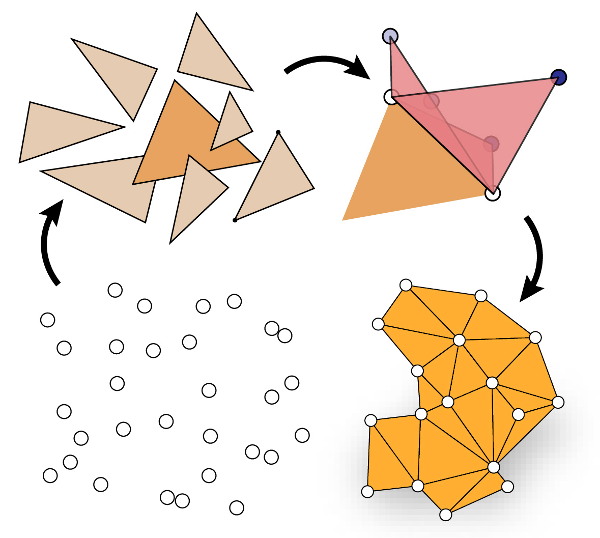
Marie-Julie Rakotosaona, Paul Guerrero, Noam Aigerman, Niloy Mitra, Maks Ovsjanikov
We present a learning-based method for reconstructing triangle meshes from point clouds. Our method first estimates local geodesic neighborhoods around each point. We then perform a 2D projection of these neighborhoods using a learned logarithmic map. A Delaunay triangulation in...
oral presentation
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021
[paper] [supplementary] [website] [code demo]
Mariem Mezghanni, Malika Boulkenafed, André Lieutier, Maks Ovsjanikov
We present a novel method aimed to endow deep generative models with physical reasoning. We introduce a loss and a learning framework that promote shape connectivity and physical stability. Our proposed physical losses are fully differentiable and we demonstrate their...
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021
[paper] [supplementary]
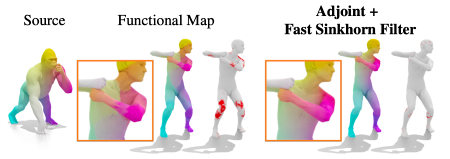
Gautam Pai, Jing Ren, Simone Melzi, Peter Wonka, Maks Ovsjanikov
We provide a theoretical foundation for pointwise map recovery from functional maps and its relation to correspondence methods based on spectral alignment. With this analysis, we develop a novel spectral registration technique: Fast Sinkhorn Filters, which allows for the recovery...
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021
[paper] [supplementary] [code demo]
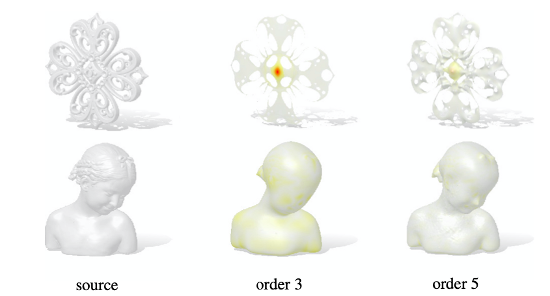
Filippo Maggioli, Simone Melzi, Maks Ovsjanikov, Michael Bronstein, Emanuele Rodolà
We propose a novel approach for the approximation and transfer of signals across 3D shapes. The proposed solution is based on taking pointwise polynomials of the Fourier-like Laplacian eigenbasis. Key to our approach is the construction of a new orthonormal...
Proc. Eurographics, 2021
[paper] [supplementary materials] [code demo]
2020
Jing Ren, Simone Melzi, Maks Ovsjanikov, Peter Wonka
In this paper we propose an approach for computing multiple high-quality near-isometric dense correspondences between a pair of 3D shapes. Our method is fully automatic and does not rely on user-provided landmarks or descriptors. This allows us to analyze the...
Transactions on Graphics (Proc. SIGGRAPH Asia), 2020
[paper [44MB]] [compressed [4MB]] [code demo]
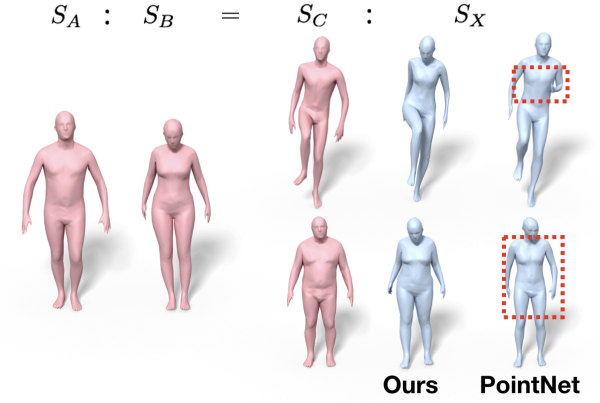
Marie-Julie Rakotosaona, Maks Ovsjanikov
We present a learning-based method for interpolating and manipulating 3D shapes represented as point clouds, that is explicitly designed to preserve intrinsic shape properties. Our approach is based on constructing a dual encoding space that enables shape synthesis and, at...
oral presentation (2% acceptance rate)
Proc. European Conference on Computer Vision (ECCV), 2020
[paper] [supplementary] [compressed [2.5MB]] [code demo] [video]
Riccardo Marin*, Marie-Julie Rakotosaona*, Simone Melzi, Maks Ovsjanikov
We propose a fully differentiable pipeline for estimating accurate dense correspondences between 3D point clouds. The proposed pipeline is an extension and a generalization of the functional maps framework. However, instead of using the Laplace-Beltrami eigenfunctions as done in previous...
*equal contribution
Proc. Conference on Neural Information Processing Systems (NeurIPS), 2020
[paper [11MB]] [supplementary] [compressed [2MB]] [code demo]
Abhishek Sharma, Maks Ovsjanikov
In this paper we investigate the deep functional map pipeline and show that using a low number of Laplacian eigen-basis, very weak supervision in the form of rigid alignment and enforcing basic structural properties of resulting functional map is sufficient...
Proc. Conference on Neural Information Processing Systems (NeurIPS), 2020
[paper] [code demo]
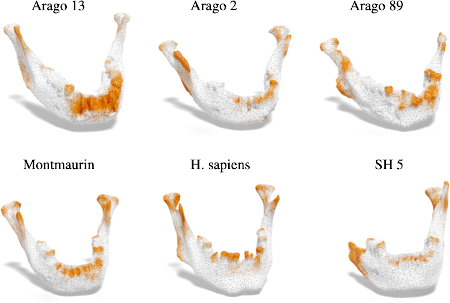
Jing Ren, Peter Wonka, Gowtham Harihara, Maks Ovsjanikov
We describe a new method and the results obtained for comparing jaws of prehistoric humans. Our main goals are to establish a methodology for comparing the structure of 3D shapes of scans of jaws using geometric data analysis techniques, and...
L'Anthropologie, 2020
[paper (Official version)] [Unofficial preprint [26MB]] [code and data]
Riccardo Marin, Arianna Rampini, Umberto Castellani, Rodolà, Maks Ovsjanikov, Simone Melzi
We introduce the first learning-based method for recovering shapes from Laplacian spectra. Our model consists of a cycle-consistent module that maps between learned latent vectors of an auto-encoder and sequences of eigenvalues. This module provides an efficient and effective linkage...
oral presentation, Best Student Paper Award
Proc. International Conference on 3D Vision (3DV), 2020
[paper [16MB]] [supplementary] [compressed [2MB]] [short video] [code demo]
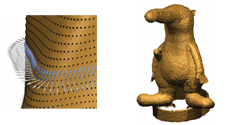
Nick Sharp, Maks Ovsjanikov
We present a differentiable and scalable approach enabling point set triangulation as a layer in 3D learning pipelines. Our method called PointTriNet iteratively applies two neural networks: a classification network predicts whether a candidate triangle should appear in the triangulation,...
Proc. European Conference on Computer Vision (ECCV), 2020
[paper] [code] [video]
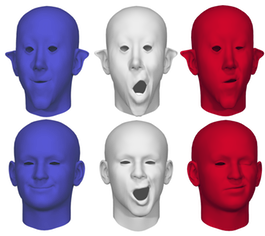
Nicolas Donati, Abhishek Sharma, Maks Ovsjanikov
We present a novel learning-based approach for computing correspondences between non-rigid 3D shapes that is both accurate and robust to changes in shape structure. Key to our method is a feature-extraction network that learns directly from raw shape geometry, combined...
oral presentation (5% acceptance rate) Best Paper Nomination (one of 26, out of 5865 submissions).
Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020
[paper] [code demo] [video]
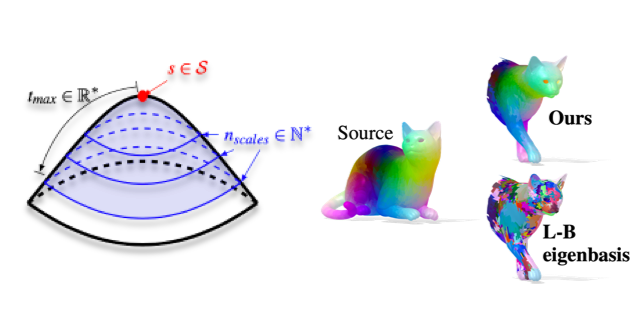
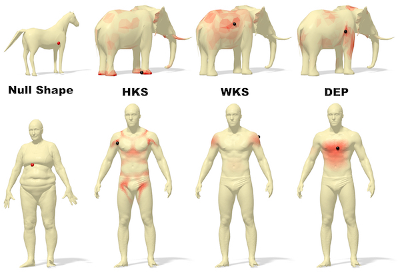
Maxime Kirgo, Simone Melzi, Giuseppe Patanè, Emanuele Rodolà, Maks Ovsjanikov
In this paper, we propose a new construction for the Mexican hat wavelets on shapes with applications to partial shape matching. Our approach takes its main inspiration from the well-established methodology of diffusion wavelets. This novel construction allows us to...
Computer Graphics Forum (CGF), 2020
[paper [14MB]] [compressed [2MB]] [video] [code demo]
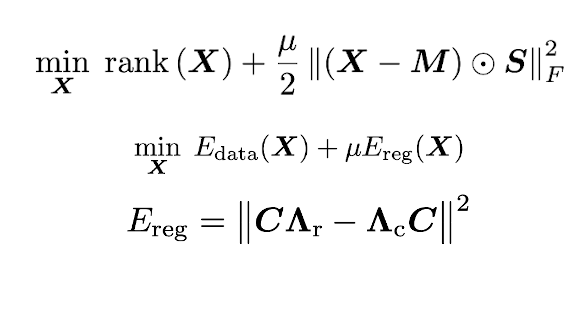
Abhishek Sharma, Maks Ovsjanikov
We propose a totally functional view of geometric matrix completion problem. Differently from existing work, we propose a novel regularization inspired from the functional map literature that is more interpretable and theoretically sound.
ICML 2020 Workshop on Graph Representation Learning and Beyond (GRL+), 2020
[workshop paper] [poster video] [code demo]
Ruqi Huang, Jing Ren, Peter Wonka, Maks Ovsjanikov
We present a method for efficiently refining correspondences among deformable 3D shape collections, while promoting the resulting map consistency. Our formulation extends a recent unidirectional spectral refinement approach, but naturally integrates map consistency constraints into the refinement. Beyond that, we...
Proc. Symposium on Geometry Processing, 2020
[paper] [compressed [3MB]] [code demo] [video]
Thibault Lescoat, Hsueh-Ti Derek Liu, Jean-Marc Thiery, Alec Jacobson, Tamy Boubekeur, Maks Ovsjanikov
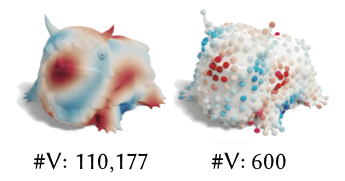
We propose a spectrum-preserving mesh decimation scheme. Given an input mesh we compute a simplified triangle mesh such that its Laplacian is spectrally close to the one of the input. We illustrate the benefit of our approach for quickly approximating...
Proc. Eurographics, 2020
[paper] [compressed [7MB]] [code demo]
2019
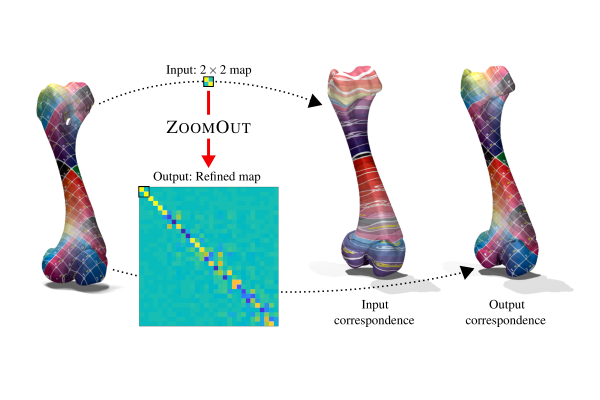
Simone Melzi, Jing Ren, Emanuele Rodolà, Abhishek Sharma, Peter Wonka, Maks Ovsjanikov
We present a simple and efficient method for refining maps or correspondences by iterative upsampling in the spectral domain that can be implemented in a few lines of code. Our main observation is that high quality maps can be obtained...
Transactions on Graphics (Proc. SIGGRAPH Asia), 2019
[paper [50MB]] [compressed [3MB]] [supplementary materials] [code demo]
Jean-Michel Roufosse, Abhishek Sharma, Maks Ovsjanikov
We present a novel method for computing correspondences across 3D shapes using unsupervised learning. Our method computes a non-linear transformation of given descriptor functions, while optimizing for global structural properties of the resulting maps, such as their bijectivity or approximate...
oral presentation, (4.6% acceptance rate) Best Paper Nomination (one of 7, out of 4303 submissions).
Proc. International Conference on Computer Vision (ICCV), 2019
[paper] [code demo] [video]
Ruqi Huang, Marie-Julie Rakotosaona, Panos Achlioptas, Leonidas Guibas, Maks Ovsjanikov
This paper proposes a learning-based framework for reconstructing 3D shapes from functional operators, compactly encoded as small-sized matrices. To this end we introduce a novel neural architecture, called OperatorNet, which takes as input a set of linear operators representing a...
Proc. International Conference on Computer Vision (ICCV), 2019
[paper] [code demo]
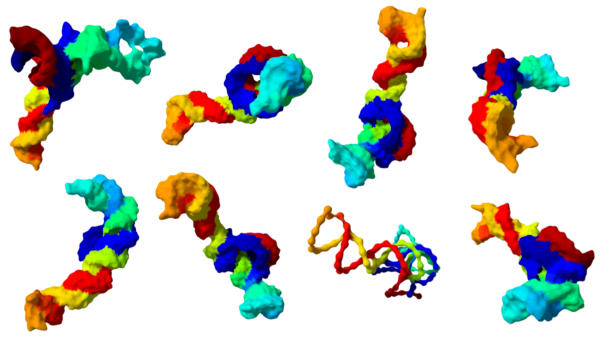
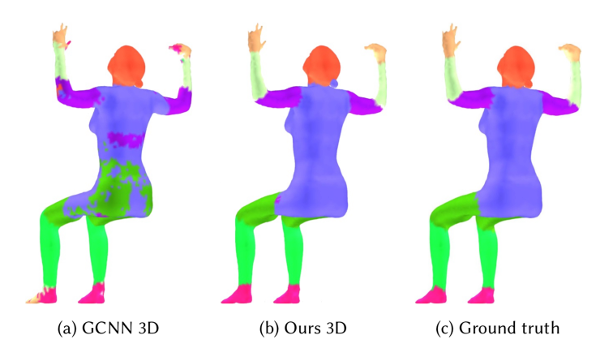
Adrien Poulenard, Marie-Julie Rakotosaona, Yann Ponty, Maks Ovsjanikov
We present a novel rotation invariant architecture operating directly on point cloud data. We demonstrate how rotation invariance can be injected into a recently proposed point-based PCNN architecture, on all layers of the network. This leads to invariance to both...
oral presentation
Proc. International Conference on 3D Vision (3DV), 2019
[paper] [code demo] [RNA surface segmentation dataset]
Arianna Rampini, Irene Tallini, Maks Ovsjanikov, Alex M. Bronstein, Emanuele Rodolà
We consider the problem of localizing relevant subsets of non-rigid geometric shapes given only a partial 3D query as the input. Such problems arise in several challenging tasks in 3D vision and graphics, including partial shape similarity, retrieval, and non-rigid...
oral presentation. Best Paper Award
Proc. International Conference on 3D Vision (3DV), 2019
[paper] [code demo]
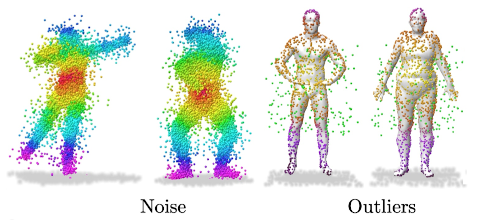
Marie-Julie Rakotosaona, Vittorio La Barbera, Paul Guerrero, Niloy J. Mitra, Maks Ovsjanikov
We propose a simple data-driven method for removing outliers and reducing noise in unordered point clouds. We base our approach on a deep learning architecture adapted from PCPNet. In our extensive evaluation, both on synthetic and real data, we show...
Computer Graphics Forum, 2019
[paper [56MB]] [compressed [9MB]] [code demo] [website with data and models]
Thibault Lescoat, Pooran Memari, Jean-Marc Thiery, Maks Ovsjanikov, Tamy Boubekeur
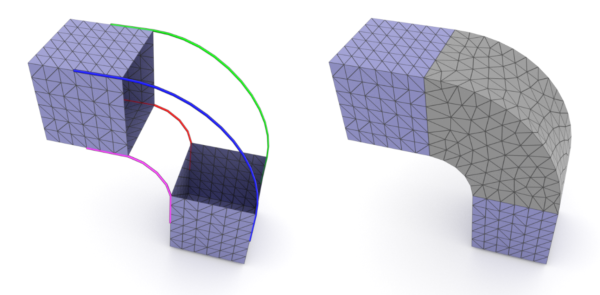
We present a method for constructing a surface mesh filling gaps between the boundaries of multiple disconnected input components. Unlike previous works, our method pays special attention to preserving both the connectivity and large-scale geometric features of input parts, while...
short paper
Computer Graphics Forum (Proc. Pacific Graphics), 2019
[paper]
Jing Ren, Mikhail Panine, Peter Wonka, Maks Ovsjanikov
We analyze a commonly used approach for regularizing functional maps, via commutativity with the Laplace-Beltrami operators and show that it has certain fundamental theoretical limitations. Instead we propose a novel, theoretically well-justified approach for regularizing functional maps, by using the...
Best Paper Award honorable mention (one of three)
Computer Graphics Forum (Proc. SGP), 2019
[paper [23MB]] [compressed [3MB]] [code demo]
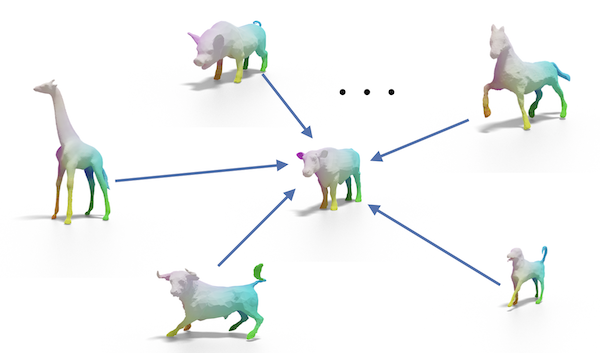
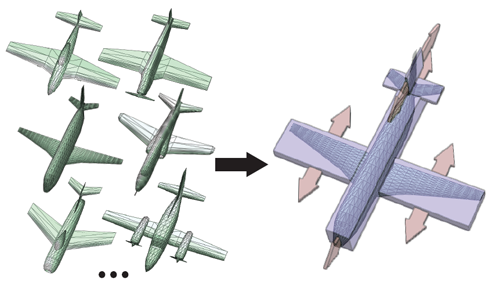
Ruqi Huang, Panos Achlioptas, Leonidas Guibas, Maks Ovsjanikov
We propose a method for extracting a central or limit shape in a collection, connected via a functional map network. Our approach is based on enriching the latent space induced by a functional map network with an additional natural metric...
Computer Graphics Forum (Proc. SGP), 2019
[paper [29MB]] [compressed [4MB]] [code demo]
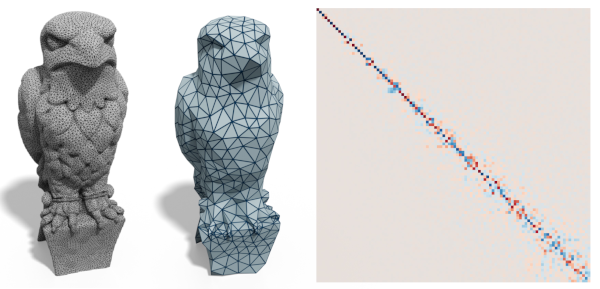
Hsueh-Ti Derek Liu, Alec Jacobson, Maks Ovsjanikov
We show that it is possible to significantly reduce the sampling density of an operator derived from a 3D shape without affecting the low-frequency eigenvectors. For this, we first introduce a novel approach to measure the behavior of a geometric...
Transactions on Graphics (Proc. SIGGRAPH), 2019
[paper [58MB]] [compressed [6MB]] [code demo]
Luca Cosmo, Mikhail Panine, Arianna Rampini, Maks Ovsjanikov, Michael Bronstein, Emanuele Rodolà
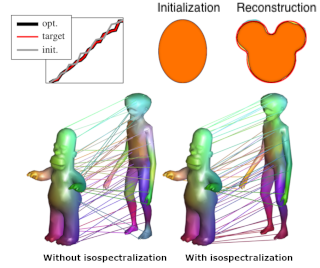
The question whether one can recover the shape of a geometric object from its Laplacian spectrum (‘hear the shape of the drum’) is a classical problem in spectral geometry with a broad range of implications and applications. While theoretically the...
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019
[paper] [code demo]
Etienne Corman, Maks Ovsjanikov
In this paper we present a novel representation for deformation fields of 3D shapes, by considering the induced changes in the underlying metric. In particular, our approach allows to represent a deformation field in a coordinate-free way as a linear...
Transactions on Graphics (to be presented at SIGGRAPH), 2019
[paper] [supplementary material]
2018
Adrien Poulenard, Maks Ovsjanikov
We propose an approach for performing convolution of signals on curved surfaces and show its utility in a variety of geometric deep learning applications. Key to our construction is the notion of directional functions defined on the surface which can...
Transactions on Graphics (Proc. SIGGRAPH Asia), 2018
[paper] [sample code]

Jing Ren, Adrien Poulenard, Peter Wonka, Maks Ovsjanikov
We propose a method for efficiently computing orientation-preserving and approximately continuous correspondences between non-rigid shapes, using the functional maps framework. We first show how orientation preservation can be formulated directly in the functional (spectral) domain without using landmark or region...
Transactions on Graphics (Proc. SIGGRAPH Asia), 2018
[paper] [sample code]
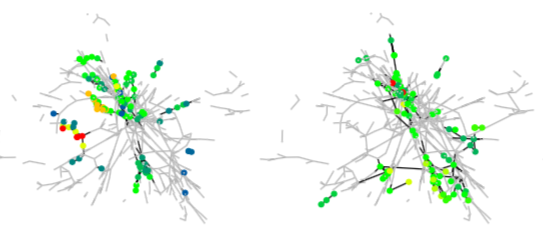
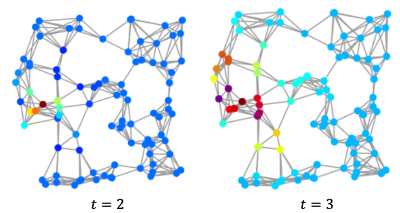
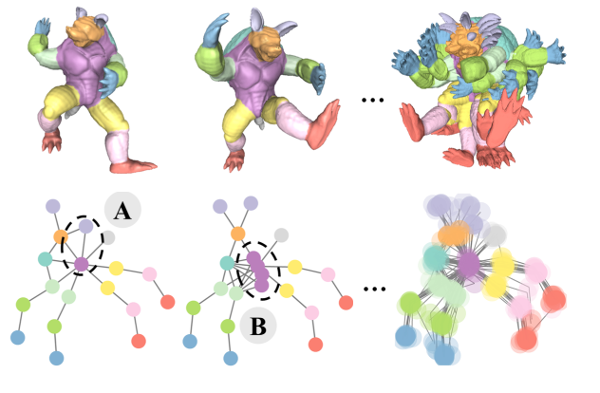
Luca Castelli Aleardi, Semih Salihoglu, Gurprit Singh, Maks Ovsjanikov
We propose a novel framework for detecting, quantifying and visualizing changes between two snapshots of a dynamic network. We show how a theoretically-justified, inherently multi-scale notion of change, or distortion, can be defined and computed using spectral graph-theoretic tools. Our...
Complex Networks, 2018
[preprint] [extended version]

Adrien Poulenard, Primoz Skraba, Maks Ovsjanikov
We present an approach for optimizing real-valued functions based on a wide range of topological criteria. Our method is based on using persistence diagrams associated with real-valued functions, and on the analysis of the derivatives of these diagrams with respect...
Computer Graphics Forum (Proc. SGP), 2018
[paper] [sample code]
Thibault Lescoat, Maks Ovsjanikov, Pooran Memari, Jean-Marc Thiery, Tamy Boubekeur
In this survey, we provide an overview of data-driven dictionary-based methods in geometric modeling. We structure our discussion by application domain: surface reconstruction, compression, and synthesis. Contrary to previous surveys, we place special emphasis on dictionary-based methods suitable for 3D...
Computer Graphics Forum (Eurographics State-of-the-Art Report), 2018
[survey paper] [website]
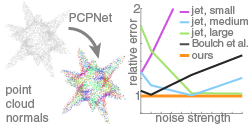
Paul Guerrero, Yanir Kleiman, Maks Ovsjanikov, Niloy J. Mitra
We propose a deep-learning based approach for estimating local 3D shape properties in point clouds. Our approach is especially well-adapted for estimating local shape properties such as normals (both unoriented and oriented) and curvature from raw point clouds in the...
Computer Graphics Forum (Proc. Eurographics), 2018
[paper] [code and data]
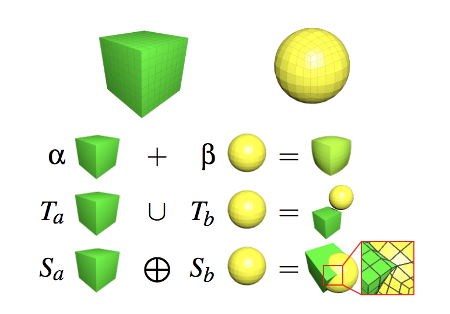
Dorian Nogneng*, Simone Melzi*, Emanuele Rodolà, Umberto Castellani, Michael Bronstein and Maks Ovsjanikov
We consider the problem of information transfer across shapes and propose an extension to the functional map representation. Our main observation is that the functional algebra (i.e., the ability to take pointwise products of functions) can significantly extend the power...
*equal contribution
Computer Graphics Forum (Proc. Eurographics), 2018
[paper] [supplementary material] [code demo]
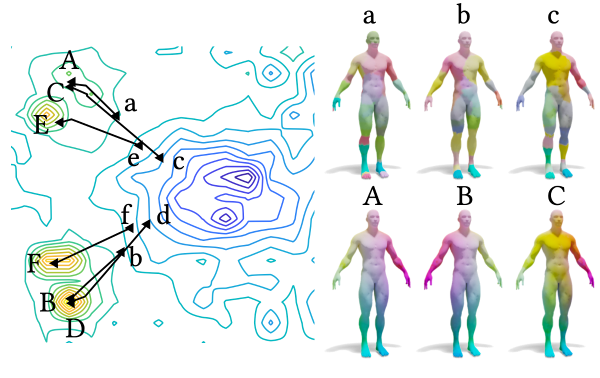
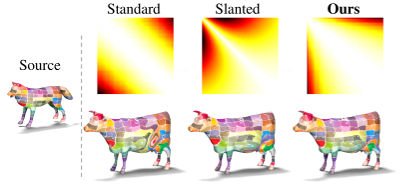
Yanir Kleiman and Maks Ovsjanikov
We present a robust method to find region-level correspondences between shapes, which are invariant to changes in geometry and applicable across multiple shape representations. We generate simplified shape graphs by jointly decomposing the shapes, and devise an adapted graph-matching technique,...
Computer Graphics Forum, 2018
[paper] [sample code]
Simone Melzi, Maks Ovsjanikov, Giorgio Roffo, Marco Cristani and Umberto Castellani
We propose a theoretically sound and efficient approach for the simulation of a discrete time evolution process that runs through all possible paths between pairs of points on a surface represented as a triangle mesh in the discrete setting. We...
Transactions on Graphics (presented at SIGGRAPH), 2018
[paper] [sample code]
2017

Matteo Denitto, Simone Melzi, Manuele Bicego, Umberto Castellani, Alessandro Farinelli, Mário A. T. Figueiredo, Yanir Kleiman, Maks Ovsjanikov
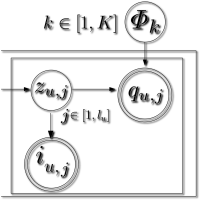
We exploit the connection between biclustering and matching and use it to develop a new region-based correspondence algorithm, which: (i) casts the problem from a probabilistic low-rank matrix factorization perspective; (ii) uses a spike and slab prior to induce sparsity;...
International Conference on Computer Vision (ICCV), 2017
[paper] [poster] [code demo]
Jing Ren, Jens Schneider, Maks Ovsjanikov and Peter Wonka
We present a novel approach for computing joint graph layouts and use it to visualize collections of segmented meshes. Our algorithm takes as input the set of graphs along with partial, possibly soft, correspondences between them and constructs a consistent...
Transactions on Visualization and Computer Graphics (TVCG), 2017
[paper] [video] [code demo]
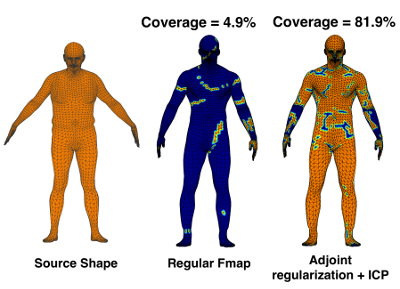
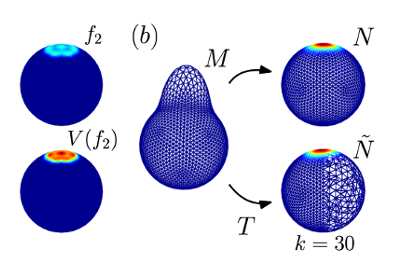
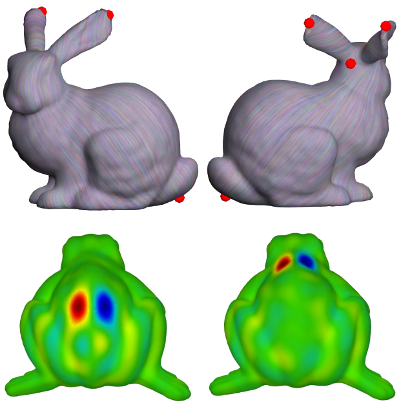
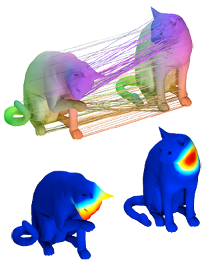
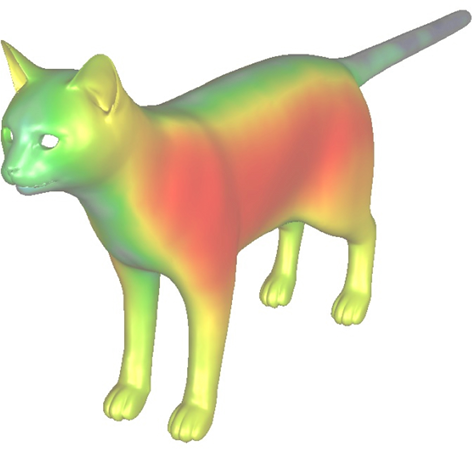
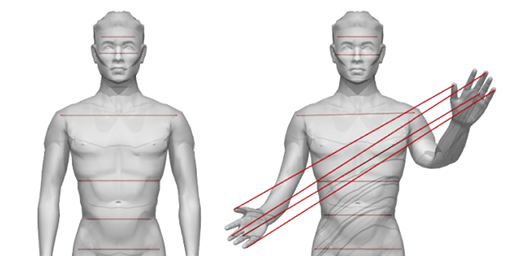
Ruqi Huang and Maks Ovsjanikov
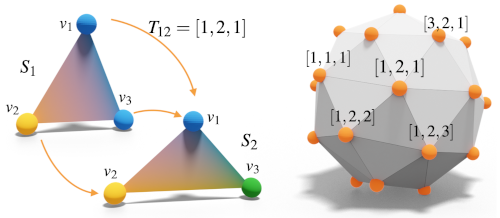
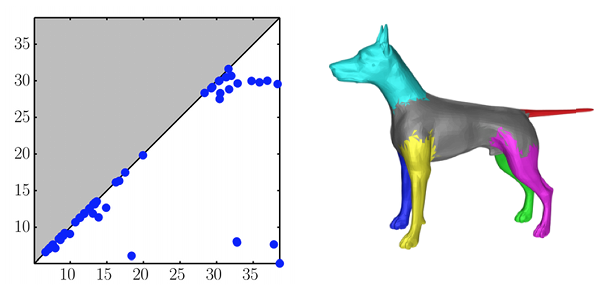
We propose to consider the adjoint operators of functional maps and demonstrate their utility in several tasks in geometry processing. Unlike a functional map, the adjoint operator reflects both the map and its distortion. We show that this property of...
Awarded the Replicability Stamp
Computer Graphics Forum (proc. Symposium on Geometry Processing), 2017
[paper] [code]
Ruqi Huang, Frederic Chazal and Maks Ovsjanikov
In this paper, we provide stability guarantees for two frameworks that are based on the notion of functional maps - the shape difference operators and the techniques used to analyze and visualize the deformations between shapes. In theory, we formulate...
Computer Graphics Forum, 2017
[paper]
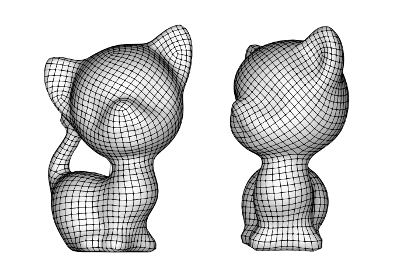
Omri Azencot, Etienne Corman, Mirela Ben-Chen and Maks Ovsjanikov
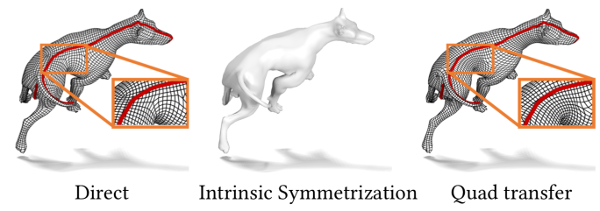
We propose a novel technique for computing consistent cross fields on a pair of triangle meshes given an input correspondence, which we use as guiding fields for approximately consistent quadrangulations. Unlike the majority of existing methods our approach does not...
Transactions on Graphics (Proc. SIGGRAPH), 2017
[paper]

Maks Ovsjanikov
This habilitation dissertation describes a set of approaches for analyzing and processing 3D shapes and their relations. The main unifying theme of this work is the observation that many concepts in geometric data analysis can be considered, both in theory...
Habilitation à diriger des recherches (Université Paris-Sud), 2017
[Habilitation thesis]
Dorian Nogneng and Maks Ovsjanikov
We show that considering descriptors as linear operators acting on functions through multiplication, rather than as simple scalar-valued signals, allows to extract significantly more information from a given descriptor and ultimately results in a more accurate map estimation. Namely, we...
Computer Graphics Forum (Proc. Eurographics), 2017
[paper] [code demo]
Etienne Corman*, Justin Solomon*, Mirela Ben-Chen, Leonidas Guibas, Maks Ovsjanikov
We propose a novel way to capture and characterize distortion between shapes, by first showing that the discrete metric can be recovered from the previously proposed shape difference operators, by solving two linear systems of equations. We then introduce an...
*equal contribution
ACM Transactions on Graphics (TOG), presented at SIGGRAPH, 2017
[paper]

Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal, Alex Bronstein
These course notes introduce the audience to the techniques for computing and processing correspondences between geometric objects, such as 3D shapes, images or point clouds based on the functional map framework. We provide the mathematical background, computational methods and various...
Proc. SIGGRAPH courses, 2017
[SIGGRAPH 2017 course notes] [SIGGRAPH 2017 course website] [SIGGRAPH Asia 2016 course website]
2016

Moos Hueting, Viorica Pătrăucean, Maks Ovsjanikov, Niloy Mitra
In this paper, we propose the concept of a scene map, a coarse scene representation, which describes the locations of the objects present in the scene from a top down view, as well as a pipeline to extract such a...
Proc. VMV - Vision, Modeling and Visualization, 2016
[paper] [webpage] [code]
Vignesh Ganapathi-Subramanian, Boris Thibert, Maks Ovsjanikov, Leonidas Guibas
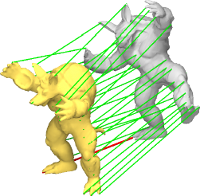
We propose a method to build correspondences between regions or parts of 3D models that are related but not necessarily very similar. We first build an affinity matrix between points on the two shapes, based on feature rank similarity over...
Computer Graphics Forum (proc. Symposium on Geometry Processing), 2016
[paper] [code demo]
Thomas Bonis, Maks Ovsjanikov, Steve Oudot and Frederic Chazal
We propose a novel pooling approach for shape classification and recognition using the bag-of-words pipeline, based on topological persistence. Our technique extends standard max-pooling and provides significantly more informative and spatially sensitive characterizations of the feature functions.
International Workshop on Computational Topology in Image Context, 2016
[paper]
2015
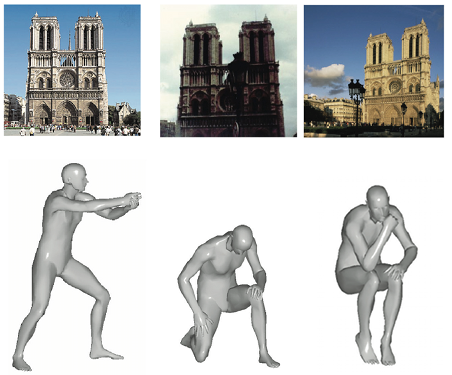
Moos Hueting, Maks Ovsjanikov, Niloy Mitra
We introduce a system for joint image-3D model processing that uses the complementary strengths of each data modality to facilitate analysis and exploration. We use it to improve the quality of text-based 3D model search, align the filtered 3D model...
Transactions on Graphics (Proc. SIGGRAPH Asia), 2015
[paper] [video] [webpage] [code]
Mathieu Carrière, Steve Oudot and Maks Ovsjanikov
In this paper, we propose the first point descriptor that captures the topological structure of a shape as "seen" from a single point, in a multiscale and provably stable way. We also demonstrate how a large class of topological signatures,...
Computer Graphics Forum (Proc. Symposium on Geometry Processing), 2015
[paper]

Etienne Corman, Maks Ovsjanikov and Antonin Chambolle
We present a new method for non-rigid shape matching designed to enforce continuity of the resulting correspondence. In particular, starting from an arbitrary continuous map between two surfaces we find an optimal flow that makes the final correspondence operator as...
Computer Graphics Forum (Proc. Symposium on Geometry Processing), 2015
[paper] [code]
Luca Castelli Aleardi, Alexandre Nolin and Maks Ovsjanikov
We consider the problem of designing efficient iterative methods for solving linear systems, associated with Laplacian matrices of undirected graphs. In particular, we study a class of preconditioners, known as tree preconditioners, introduced by Vaidya, and propose a very simple...
Proc. International Symposium on Experimental Algorithms (SEA), 2015
[paper] [code]
Omri Azencot, Maks Ovsjanikov, Frederic Chazal and Mirela Ben-Chen
We consider the problem of computing the Levi-Civita covariant derivative on triangle meshes, and provide a simple, easy-to-implement discretization for which we demonstrate experimental convergence. We also formally show the imposibility of satisfying all of the properties of Levi-Civita connection...
Transactions on Graphics (TOG), presented at SIGGRAPH, 2015
[paper] [supplementary material]

Viorica Pătrăucean and Maks Ovsjanikov
In this paper, we propose a simple and efficient scheme for object instance recognition that can cover a of full affine transformations. Remarkably, although 3 feature pairs are necessary to define a unique affine transformation, we show how a quadratic...
IAPR International Conference on Machine Vision Applications (MVA), 2015
[paper]
2014
Etienne Corman, Maks Ovsjanikov, Antonin Chambolle
We present a novel method for computing correspondences between pairs of non-rigid shapes. Unlike the majority of existing techniques that assume a deformation model, we consider the problem of learning a correspondence model given a collection of reference pairs with...
Workshop on Non-Rigid Shape Analysis and Deformable Image Alignment (NORDIA), Proc. ECCV, 2014
[paper] [code]
Omri Azencot, Steffen Weißmann, Maks Ovsjanikov, Max Wardetzky, Mirela Ben-Chen
We consider the problem of simulating the behavior of an incompressible fluid on a curved surface represented as an unstructured triangle mesh. We propose to model fluids using their vorticity, i.e., by a (time-varying) scalar function on the surface. The...
Computer Graphics Forum (Proc. SGP), 2014
[paper] [video]
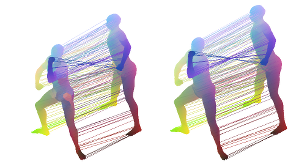
Fan Wang, Qixing Huang, Maks Ovsjanikov, Leonidas Guibas
In this paper, we present a method to jointly segment a set of images containing objects from multiple classes. We first establish consistent functional maps across the input images, and introduce a formulation that explicitly models partial similarity across images...
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2014
[paper]
Chunyuan Li, Maks Ovsjanikov and Frederic Chazal
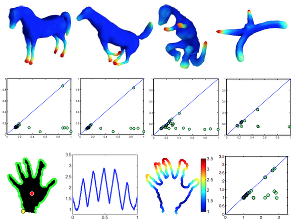
We demonstrate that persistence diagrams built from functions defined on the objects can serve as compact and informative descriptors for images and shapes. Extensive experiments on 3D shape retrieval, hand gesture recognition and texture classification demonstrate that this approach can...
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2014
[paper]
2013

Viorica Pătrăucean, Rafael Grompone von Gioi, Maks Ovsjanikov
We propose a novel approach for detecting partial reflectional symmetry in images. Our method uses a principled statistical procedure inspired from the a contrario theory to validate potential symmetries by minimizing the number of false positives.
Workshop on Symmetry Detection from Real World Images, Proc. CVPR, 2013
[paper]
Omri Azencot, Mirela Ben-Chen, Frederic Chazal, Maks Ovsjanikov
We introduce a novel coordinate-free method for manipulating and analyzing vector fields on discrete surfaces. Unlike the commonly used representations of a vector field as an assignment of vectors to the faces of the mesh, or as real values on...
Computer Graphics Forum (Proc. of SGP), 2013
[paper] [code]

Maks Ovsjanikov, Quentin Mérigot, Viorica Pătrăucean, Leonidas Guibas
In this paper, we consider the symmetric ambiguity problem present when matching shapes with intrinsic symmetries. Instead of sampling landmark correspondences, we address this problem directly by performing shape matching in an appropriate quotient space, where the symmetry has been...
Computer Graphics Forum (Proc. of SGP), 2013
[paper]
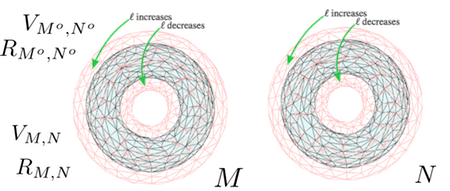
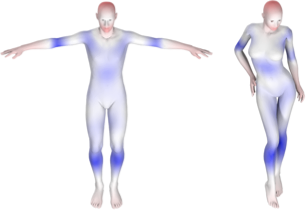
Raif Rustamov, Maks Ovsjanikov, Omri Azencot, Mirela Ben-Chen, Frederic Chazal, Leonidas Guibas
We develop a novel formulation for the notion of shape differences, aimed at providing detailed information about the location and nature of the differences or distortions between the two shapes being compared. Our difference operator, derived from a shape map....
ACM Transactions on Graphics (Proc. SIGGRAPH), 2013
[paper]
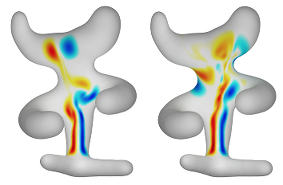
Maks Ovsjanikov, Mirela Ben-Chen, Frederic Chazal and Leonidas Guibas
In this paper we propose a method for analysing and visualizing individual maps between shapes, or collections of such maps. Unlike the majority of prior work, which focuses on discovering maps in the context of shape matching, our main focus...
Computer Graphics Forum (CGF), 2013
[paper]
2012
Maks Ovsjanikov, Mirela Ben-Chen, Justin Solomon, Adrian Butscher and Leonidas Guibas
We present a novel representation of maps between pairs of shapes that allows for efficient inference and manipulation. Key to our approach is a generalization of the notion of map that puts in correspondence real-valued functions rather than points on...
ACM Transactions on Graphics (Proc. SIGGRAPH), 2012
[paper] [code]
2011
Maks Ovsjanikov, Qi-xing Huang and Leonidas Guibas
In this paper, we study the hardness of the problem of shape matching, and introduce the notion of the shape condition number, which captures the intuition that some shapes are inherently more difficult to match against than others, depending on...
Comput. Graph. Forum (Proc. SGP), 2011
[paper]
Maks Ovsjanikov, Wilmot Li, Leonidas Guibas and Niloy Mitra
We present a method for discovering and exploring continuous variability in a collection of 3D shapes without correspondences. Our method is based on a novel navigation interface that allows users to explore a collection of related shapes by deforming a...
ACM Transactions on Graphics (Proc. SIGGRAPH), 2011
[paper] [video]
Alexander Bronstein, Michael Bronstein, Leonidas Guibas and Maks Ovsjanikov
In this article, we bring the spirit of feature-based computer vision approaches to the problem of nonrigid shape search and retrieval. Using multiscale diffusion heat kernels as “geometric words,” we construct compact and informative shape descriptors.
ACM Transactions on Graphics (presented at SIGGRAPH), 2011
[paper] [code]
2010
Quentin Mérigot, Maks Ovsjanikov and Leonidas Guibas
We present an efficient and robust method for extracting curvature information, sharp features and normal directions of a piecewise smooth surface from its point cloud sampling in a unified framework.
IEEE Transactions On Visualisation and Computer Graphics (TVCG), 2010
[paper] [code]
Maks Ovsjanikov and Ye Chen
We propose an efficient topic modeling framework in the presence of volatile dyadic observations when direct topic modeling is infeasible. We show both theoretically and empirically that often-available unstructured and semantically-rich meta-data can serve as a…
Proc. European Conference on Machine Learning (ECML/PKDD), 2010
[paper]
Maks Ovsjanikov, Quentin Mérigot, Facundo Mémoli and Leonidas Guibas
In this paper, we show that under mild genericity conditions, a single correspondence can be used to recover an isometry defined on entire shapes, and thus the space of all isometries can be parameterized by one correspondence between a pair...
Computer Graphics Forum (Proc. SGP), 2010
[paper]
Primoz Skraba, Maks Ovsjanikov, Frederic Chazal and Leonidas Guibas
In this paper, we combine two ideas: persistence-based clustering and the Heat Kernel Signature (HKS) function to obtain a multi-scale isometry invariant mesh segmentation algorithm. The key advantages of this approach is that it is tunable through a few intuitive...
Best Paper Award
NORDIA Workshop, Proc. CVPR, 2010
[paper] [code demo]
Alexander Bronstein, Michael Bronstein, Benjamin Bustos et al.
The benchmark tests the performance of shape feature detectors and descriptors under a wide variety of transformations.
Proc. Eurographics 2010 Workshop on 3D Object Retrieval (3DOR), 2010
[paper]
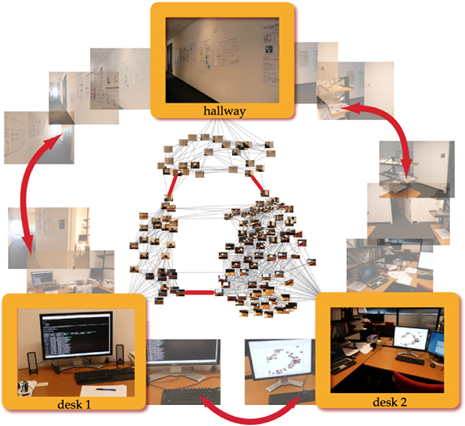
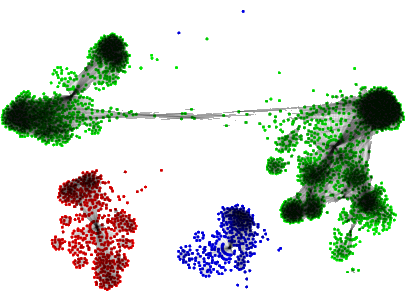
Kyle Heath, Natasha Gelfand, Maks Ovsjanikov, Mridul Aanjaneya, Leonidas Guibas
The focus of this paper is to study the large-scale connectivity of image collections and the use of this connectivity in a variety of applications.
Proc. Conference on Computer Vision and Pattern Recognition (CVPR), 2010
[paper]
Bart Adams, Martin Wicke, Maks Ovsjanikov, Michael Wand, Hans-Peter Seidel and Leonidas Guibas
We present physically based algorithms for interactive deformable shape and motion modeling. We coarsely sample the objects with simulation nodes, and apply a meshless finite element method to obtain realistic deformations.
Computer Graphics Forum (CGF), 2010
[paper]

Maks Ovsjanikov, Alexander Bronstein, Michael Bronstein and Leonidas Guibas
Feature-based methods have recently gained popularity in computer vision and pattern recognition communities. In this paper, we explore analogous approaches in the 3D world applied to the problem of non-rigid shape search and retrieval in large databases.
NORDIA Workshop, Proc. ICCV, 2010
[paper] [related code]
2009

Quentin Mérigot, Maks Ovsjanikov and Leonidas Guibas
We present an efficient and robust method for extracting principal curvatures, sharp features and normal directions of a piecewise smooth surface from its point cloud sampling, with theoretical guarantees.
Best Paper Award
Proc. SIAM/ACM, GD/SPM, 2009
[paper] [code]
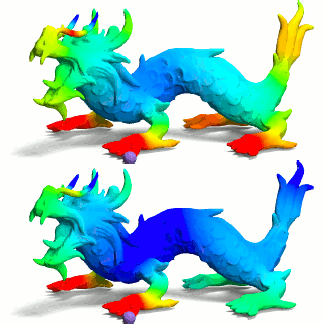
Jian Sun, Maks Ovsjanikov and Leonidas Guibas
We propose a novel point signature based on the properties of the heat diffusion process on a shape. Our signature, called the Heat Kernel Signature (or HKS), is obtained by restricting the well-known heat kernel to the temporal.
Best Paper Award
Proc. Symposium on Geometry Processing (SGP), 2009
[paper]

Michael Wand, Bart Adams, Maks Ovsjanikov, Alexander Berner, Martin Bokeloh, Philipp Jenke, Leonidas Guibas, Hans-Peter Seidel, Andreas Schilling
We present a new technique for reconstructing a single shape and its non-rigid motion from 3D scanning data. Our algorithm takes a set of time-varying sample points that show partial views of a deforming object.
ACM Transactions on Graphics (TOG), 2009
[paper]
2008
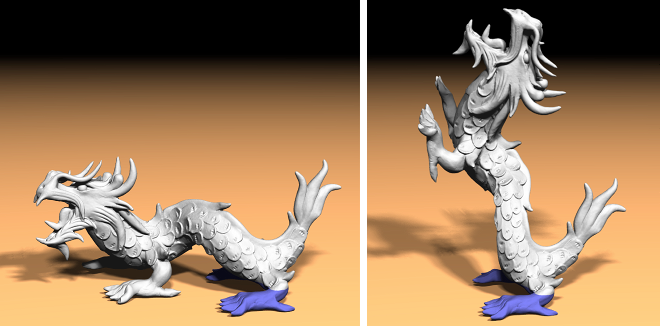
Maks Ovsjanikov, Jian Sun and Leonidas Guibas
In this paper, we present a novel approach for efficiently computing symmetries of a shape which are invariant up to isometry preserving transformations. We show that the intrinsic symmetries are transformed into the Euclidean.
Best Student Paper Award
Computer Graphics Forum (Proc. SGP), 2008
[paper]
Bart Adams, Maks Ovsjanikov, Michael Wand, Hans-Peter Seidel and Leonidas J. Guibas
We present a new framework for interactive shape deformation modeling and key frame interpolation based on a meshless finite element formulation. We formulate rigidity and volume preservation constraints.
Proc. ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), 2008
[paper] [video]
2007
Niloy J. Mitra, Simon Floery, Maks Ovsjanikov, Natasha Gelfand, Leonidas Guibas and Helmut Pottmann
We propose an algorithm that performs registration of large sets of unstructured point clouds of moving and deforming objects without computing correspondences. Given as input a set of frames with dense spatial.
Proc. Eurographics Symposium on Geometry Processing (SGP), 2007
[paper]