On considère un système linéaire et l'on se propose de calculer l'état
à partir de la sortie ![]() , en supposant que le système est observable.
, en supposant que le système est observable.
Pour celà, on va construire un état fictif ![]() , solution de
l'équation
, solution de
l'équation
![]() . Ainsi, on aura
. Ainsi, on aura
![]() .
.
PROPOSITION 22. -- Les coefficients du polynôme caractéristique de la matrices ![]() s'expriment linéairement en fonction des coefficients de
s'expriment linéairement en fonction des coefficients de ![]() .
.
On peut résoudre le système et fixer arbitrairement les coefficients du
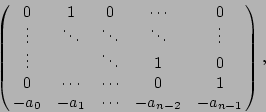
polynôme caractéristique ssi le système est observable.PREUVE. -- Plaçons-nous pour simplifier dans le cas d'une seule sortie ![]() . Si le
système est observable, on peut prendre pour nouvel état du système
. Si le
système est observable, on peut prendre pour nouvel état du système
![]() ,
, ![]() , ...,
, ..., ![]() . La matrice
. La matrice ![]() est dans une telle base
de la forme
est dans une telle base
de la forme
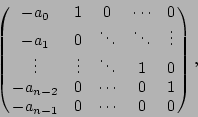
Ceci prouve que l'on peut assigner les valeurs propres si le système est
observable. S'il ne l'est pas, on peut factoriser ![]() en un
produit
en un
produit ![]() , où les coefficients du premier facteur, de degré égal à
la dimension
, où les coefficients du premier facteur, de degré égal à
la dimension ![]() de l'espace vectoriel engendré par la sortie
de l'espace vectoriel engendré par la sortie ![]() et ses
dérivées peuvent être choisis arbitrairement en fonction de
et ses
dérivées peuvent être choisis arbitrairement en fonction de ![]() , et où
le second facteur
, et où
le second facteur ![]() est indépendant de
est indépendant de ![]() . La preuve, élémentaire,
est laissée au lecteur. height .9ex width .8ex depth -.1ex
. La preuve, élémentaire,
est laissée au lecteur. height .9ex width .8ex depth -.1ex
Ceci nous permet de construire un observateur en choisissant les
coefficients de manière à ce que les valeurs propres soient
toutes à partie réelle strictement négative. Ainsi,
asymptotiquement, ![]() tend vers
tend vers ![]() . Si l'on prend des parties
réelles faiblement négative, la convergence sera plus lente,
mais le résultat moins sensible au bruit, qui sera «
moyenné» il y a un compromis à faire entre vitesse de
convergence et précision.
. Si l'on prend des parties
réelles faiblement négative, la convergence sera plus lente,
mais le résultat moins sensible au bruit, qui sera «
moyenné» il y a un compromis à faire entre vitesse de
convergence et précision.
Ce type d'observateur a été proposé par David G. Luenberger en 1966, dans le cas général, le cas d'une seule sortie ayant été publié dès 1964.
Cette méthode supose de connaître avec une très bonne
précision les coefficients du système, car les valeurs propres
sont très sensibles aux variation des coefficients du polynôme
caractéristique. Considérons en effet le polynôme de Wilkinson
![]() , il suffit
d'ajouter
, il suffit
d'ajouter ![]() au terme de degré
au terme de degré ![]() de W, pour que le nouveau
polynôme n'ait plus que
de W, pour que le nouveau
polynôme n'ait plus que ![]() racines réelles. Celles-ci sont
heureusement toutes à partie réelle strictement négatives. Mais si
l'on prend
racines réelles. Celles-ci sont
heureusement toutes à partie réelle strictement négatives. Mais si
l'on prend
![]() au lieu de
au lieu de ![]() , les
parties réelles des racines vont de
, les
parties réelles des racines vont de ![]() à
à ![]() . Bien que
l'on se soit seulement trompé de
. Bien que
l'on se soit seulement trompé de ![]() sur la valeur du premier
coefficient, les valeurs propres varient elles de
sur la valeur du premier
coefficient, les valeurs propres varient elles de ![]() à
à ![]() !
!
Or, il n'est pas suffisant d'avoir un processus qui converge, il faut que celui-ci le fasse assez vite, pour pouvoir disposer à temps d'une évaluation correcte de l'état, mais pas trop, de manière à avoir un résultat peu sensible au bruit. Le choix des valeurs est donc le résultat d'un compromis délicat, qui devient très aléatoire si les valeurs des coefficients sont trop incertaines.
On peut, si l'on dispose de ![]() sorties indépendantes, construire un
observateur d'ordre
sorties indépendantes, construire un
observateur d'ordre ![]() seulement. En effet, tel que nous l'avons
décrit, l'observateur recalcule la valeur de la sortie. Ceci n'est pas
nécessairement un inconvénient, car la valeur recalculée peut être
meilleure que celle d'origine, bruitée.
seulement. En effet, tel que nous l'avons
décrit, l'observateur recalcule la valeur de la sortie. Ceci n'est pas
nécessairement un inconvénient, car la valeur recalculée peut être
meilleure que celle d'origine, bruitée.